Recent advancements in the field of technology have enabled scientists to use fuel explosion as the power source to achieve rapid and powerful motion for medium-sized soft robots.
The new system, created by researchers at the Beijing Institute of Technology and the University of Lancaster, provides a new kind of actuation system for the robotic system. It has promising patentability to vastly improve the working length of conventional medium-size soft robots.
“Achieving the rapid and fast motion of the medium-size robot has been a challenging task for many years,” explained Lancaster University’s Nan Ma, who led the research.
The study’s corresponding paper, ‘Design of a fuel explosion-based chameleon-like soft robot aided by the comprehensive dynamic model,’ was published in the journal Cyborg and Bionic Systems.
What are the benefits of soft robots?
In recent years, different types of soft robots have been developed to satisfy the requirements of varying applications. These soft material-based robotic systems have many advantages over the traditional rigid ones, including improved range of motion (ROM), better adaptability in unstructured areas, reduced cost, and lower weight.
Hyperelastic materials, such as elastomers, are usually adopted to support the motion of soft robotic systems. For example, a wide range of soft robots has been developed in recent years to mimic the movement of animals. These include the Multigait soft robot, which mimics an elephant’s trunk.
However, the capability of soft robots for long-distance and high-speed linear motions is somewhat constrained by their structure, including the fact that they are constructed by multiple bending units and have an actuation system. Therefore, novel soft robots that can achieve long-distance and rapid linear reaching are desired to develop the robotic system with advanced functions.
Assessing how the systems can be improved
Different actuation methods have been studied over the past decades to improve the functions of soft robotic systems, including electroactive polymer actuators, shape memory alloy (SMA) actuators, and pneumatic actuators.
For example, electroactive polymer actuators can reduce energy consumption and improve expansion efficiencies. Moreover, the SMA actuators can reduce the weight and dimension of the system, while the pneumatic actuation can provide a high actuating force. For the above-mentioned actuators, either due to the bulk dimension or the slow response, they are not suitable to be combined with the soft robots to develop an advanced extendable robotic system, where quick response, compact dimension, and a powerful output are required.
Promisingly, the explosion-based actuator can self-regulate the actuation pressure using the chemical decomposition of hydride in a closed space, where the high force and linear output motion can be achieved. This actuator has a high force-to-weight ratio due to its simple structure and powerful output, where the complex transmission mechanism, energy accumulation mechanism, and energy release trigger mechanism can be omitted. These features are a great advantage, as they can reduce the overall weight of the system. Thanks to the advantages of the explosion-based actuation system, it can be combined with the developed linear motion soft robot to achieve fast and long-distance motion.
Implementing these changes for more efficient robotic systems
After realising these challenges, the researchers needed to design soft robots that an explosion could power to achieve linear motion. This is because the explosive process coupled with the energy conversion processes – chemical dynamics, gas-phase dynamics, and fluid dynamics processes – are critical to the successful working of the system. To solve this problem, the researchers proposed a set of unique design principles for their soft robot.
Firstly, Michael T Tolley presented an untethered soft-bodied robot using a combination of pneumatic and explosive actuators to execute directional jumping manoeuvres. Then, Robert F Shepherd demonstrated the rapid actuation of pneu-nets using a chemical reaction to generate explosive pressure bursts. However, the researchers discovered that no soft robots powered by the explosion could realise long-distance and high-speed linear motion.
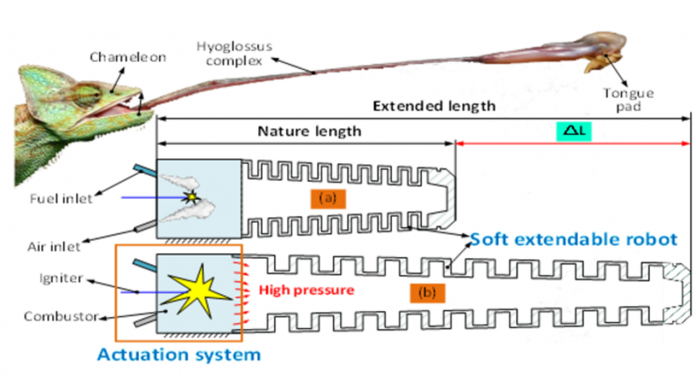
Ma stated: “To address the challenges above of the soft robots and to achieve long-distance and high-speed linear motion, a novel explosion-based soft robot was proposed.”
To support and predict the performance of the explosion-based soft robot, a new detailed dynamic model, which can be used to quantitatively predict the energy generated by the explosion and predict the deformation of the soft robot, was constructed. Furthermore, the change of working fluid (molecular numbers) and some unavoidable and influential factors, such as heat transfer loss, specific heat, and incomplete combustion, were also calculated. Lastly, the performance of the explosion-based soft robot to achieve the axial extension was tested, which is further used to verify the dynamic model developed in this paper.
The results of this study show that the developed model can be validated by the experimental results, which can provide an efficient way to guide the structure design of soft robots in the initial stage.





